
 荣誉资质
荣誉资质
 企业风采
企业风采
 联系我们
联系我们

 当前位置:
当前位置:

 推荐产品
推荐产品 





 推荐新闻
推荐新闻 

 在线留言
在线留言 详情内容
详情内容 产品介绍
此类机械手具有刚性手臂和全程中立平衡等诸多优点,因此被广泛应用于需要越过障碍、要求**定位、翻转、取置状态受限。现场环境复杂、或需要承受扭力等场合。
优势一览
a) 可实现不同重量物料的重力平衡状态,适用于物料的**移载操作。
b) 空载、满载及处理不同工件时,系统可感知其重量变化,并实现载荷在三维空间中的浮动状态,便于**定位。
c) 全程平衡、运动顺滑等特点,使得操作者可以很便捷地实现工件的搬运、定位、装配等操作。
d) 刚性手臂可使机械手带工件越过障碍;水平臂可满足物料在相关场所进行横向放入、横向取出等动作要求。
e) 系统可始终保持机械手头部的水平,发挥高作业性。
f) 关节刹车装置,具有多个回转关节,以实现广域范围内的物料取置;配备有刹车装置,操作者可在操作过程中随时中断机械手的运动。
安装形式:
1.地面固定
2.顶部固定
3.配合轨道空中移动
4.带轮子地面移动
技术参数
**工作半径:3.5米
**提升高度:2米
**提升重量:600kg
案例:联轴器搬运助力机械手

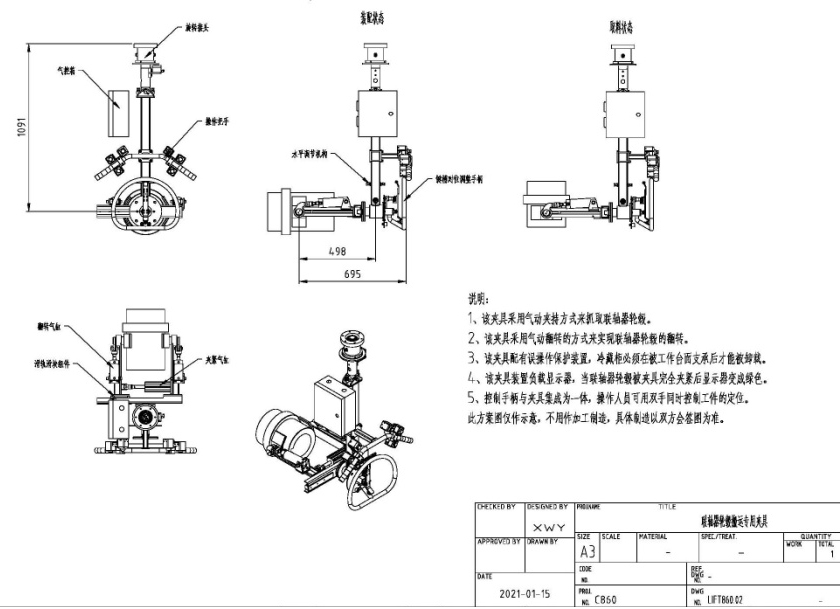
机械手工作范围:
●水平**半径 :2500mm;
●动作方式:垂直取件,水平安装;
●垂直**行程:1200mm;
●机械手可绕立柱旋转范围:360°;
●机械手终端臂转动范围:310°;
●设备运行噪声≤60dB(A)。
助力机械手气动平衡及控制系统描述:
●助力机械手设有(负载/空载)两种气动平衡及控制系统;
●助力机械手设备包含升降平衡气缸、吊装夹具、自动平衡阀、方向控制阀、速度控制阀(节流阀)、过滤器、管接头及气管、气动辅助元件等。运用气动原理,通过升降平衡气缸的运动,配合气路控制系统,可实现空载/负载平衡,在平衡状态下,操作者操作控制手柄,可根据需要任意轻松地进行上下、左右、前后的“悬浮式”移动,满足工位上的取放件搬运需要;
●助力机械手的控制系统能够实现吊取、释放、移动等动作,各类开关按钮反应快捷、可靠,操作手柄的高度和位置的设计符合人机工程学原理,机械手的动作具有关联性。
助力机械手专门设计的夹具:
●夹具开口尺寸满足**工件外形尺寸,夹具可绕终端臂720°连续旋转两圈,夹具夹持的工件能**夹持物在机械手的运动过程中始终处于稳定状态;
●助力机械手夹具通过气动夹具夹持联轴器,要求1个操作工人就能完成夹紧、提升、移动、释放的整个动作过程;
●根据相关部件的外形尺寸和工艺要求,运用人机工程学、动力学原理设计制造出结构精巧、操作简单可靠、抗高强度、经久耐用的夹具;
助力机械手安全性方面描述:
●外形结构保护:设备对于操作工和工件,以及机械手本身不具有伤害性,对于人员、工件可能构成危险的地方都有保护;
●断气、漏气保护:通过逻辑气路控制系统内的安全阀,**机械手突然断气或有漏气发生时,不会伴随发生意外坠落,夹具也不会松开工件,并且储气罐内的储存气体可以**机器完全完成当前的工作循环;
●设备配有负载指示器,当工件被提起后,显示器的灯自动亮起;
●各旋转关节(主关节、中关节、前端关节、升降关节)处设有优良稳定的刹车制动装置,每个关节的刹车制动装置是操作者通过布置在操作手柄处的刹车开关,来随时中断机械手臂杆的运动,且在闲置(不生产)状态下,机械手不发生漂移;
●夹取动作完成后,通过加载旋钮进入“负载平衡”状态,实现无重力化搬运。卸载工件后,系统由负载状态自动切换成空载平衡状态;
●所有的机械手都设有三个作为标准的比较特别的气动安全系统,这些系统分别是:
●误操作保护:直到我们的机械手感应到一个稳固的受载支撑面后,气动开关才会打开,将信号反馈给主控制系统,之后才能够释放负载,否则误按释放按钮将不起作用,工件在空中是不会被释放的,也不会在空中自动切换至空载状态;
●如果由于工厂断电而停止供给机械手气压,机械手将会使用自带的嵌入式空气存储罐来完成此次操作内容。
●即使是升降平衡气缸的连接气管意外爆裂,我们也有特殊的安全模块使得机械手不能够快速坠降。


